


Integración de la visión por ordenador en la robótica con Ultralytics YOLO11

Descubra cómo los modelos de visión por ordenador como Ultralytics YOLO11 hacen que los robots sean más inteligentes y dan forma al futuro de la robótica.

Descubra cómo los modelos de visión por ordenador como Ultralytics YOLO11 hacen que los robots sean más inteligentes y dan forma al futuro de la robótica.
Los robots han recorrido un largo camino desde Unimate, el primer robot industrial, que se inventó en la década de 1950. Lo que comenzó como máquinas preprogramadas basadas en reglas ahora ha avanzado a sistemas inteligentes capaces de realizar tareas complejas e interactuar sin problemas con el mundo real.
Hoy en día, los robots se utilizan en diversas industrias, desde la manufactura y la atención médica hasta la agricultura, para diversas automatizaciones de procesos. Un factor clave en la evolución de la robótica es la IA y la visión artificial, una rama de la IA que ayuda a las máquinas a comprender e interpretar la información visual.
Por ejemplo, modelos de visión por ordenador como Ultralytics YOLO11 están mejorando la inteligencia de los sistemas robóticos. Cuando se integra en estos sistemas, Vision AI permite a los robots reconocer objetos, navegar por entornos y tomar decisiones en tiempo real.
En este artículo veremos cómo YOLO11 puede mejorar los robots con funciones avanzadas de visión por ordenador y exploraremos sus aplicaciones en diversos sectores.
La funcionalidad principal de un robot depende de lo bien que comprenda su entorno. Esta percepción conecta su hardware físico con la toma de decisiones inteligente. Sin ella, los robots solo pueden seguir instrucciones fijas y tienen dificultades para adaptarse a entornos cambiantes o manejar tareas complejas. Al igual que los humanos dependemos de la vista para navegar, los robots utilizan la visión artificial para interpretar su entorno, comprender la situación y tomar las medidas adecuadas.
De hecho, la visión por ordenador es fundamental para la mayoría de las tareas robóticas. Ayuda a los robots a detect objetos y evitar obstáculos mientras se desplazan. Sin embargo, para ello no basta con ver el mundo; los robots también tienen que ser capaces de reaccionar con rapidez. En situaciones reales, incluso un ligero retraso puede provocar costosos errores. Modelos como Ultralytics YOLO11 permiten a los robots obtener información en tiempo real y responder al instante, incluso en situaciones complejas o desconocidas.
Antes de adentrarnos en el modo en que YOLO11puede integrarse en los sistemas robóticos, exploremos primero las principales características de YOLO11.
Los modelosYOLO Ultralytics admiten varias tareas de visión por ordenador que ayudan a obtener información rápida y en tiempo real. En concreto, Ultralytics YOLO11 ofrece un rendimiento más rápido, menores costes computacionales y una mayor precisión. Por ejemplo, puede utilizarse para detect objetos en imágenes y vídeos con gran precisión, lo que lo hace perfecto para aplicaciones en campos como la robótica, la sanidad y la fabricación.
He aquí algunas características impactantes que hacen de YOLO11 una gran opción para la robótica:
Fácil de usar: la documentación y la interfaz de fácil comprensión deYOLO11ayudan a reducir la curva de aprendizaje, lo que facilita su integración en sistemas robotizados.

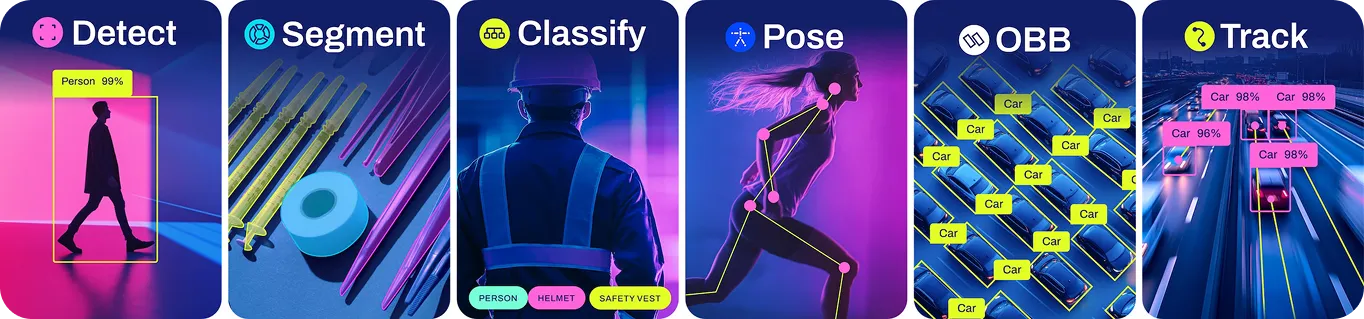
A continuación te mostramos algunas de las tareas de visión por ordenador que admite YOLO11 :
Desde el aprendizaje inteligente hasta la automatización industrial, modelos como YOLO11 pueden ayudar a redefinir lo que pueden hacer los robots. Su integración en la robótica demuestra cómo los modelos de visión por ordenador están impulsando los avances en la automatización. Exploremos algunos ámbitos clave en los que YOLO11 puede tener un impacto significativo.
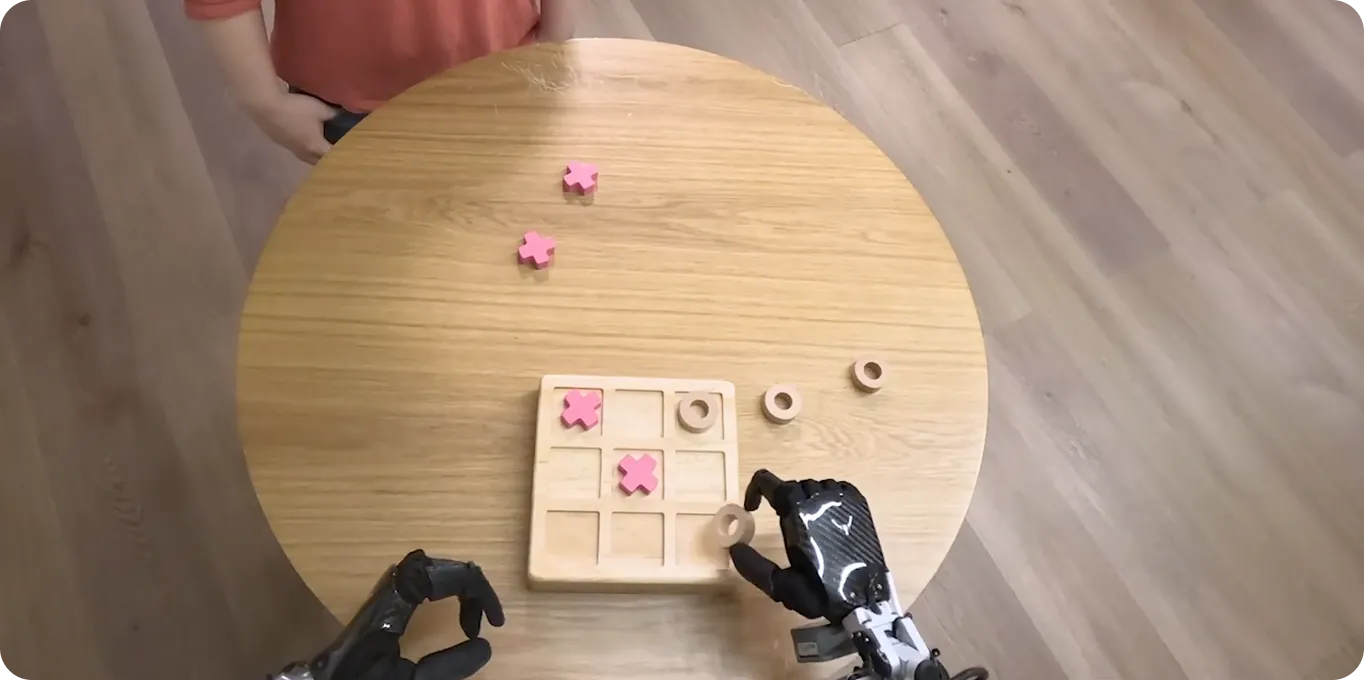
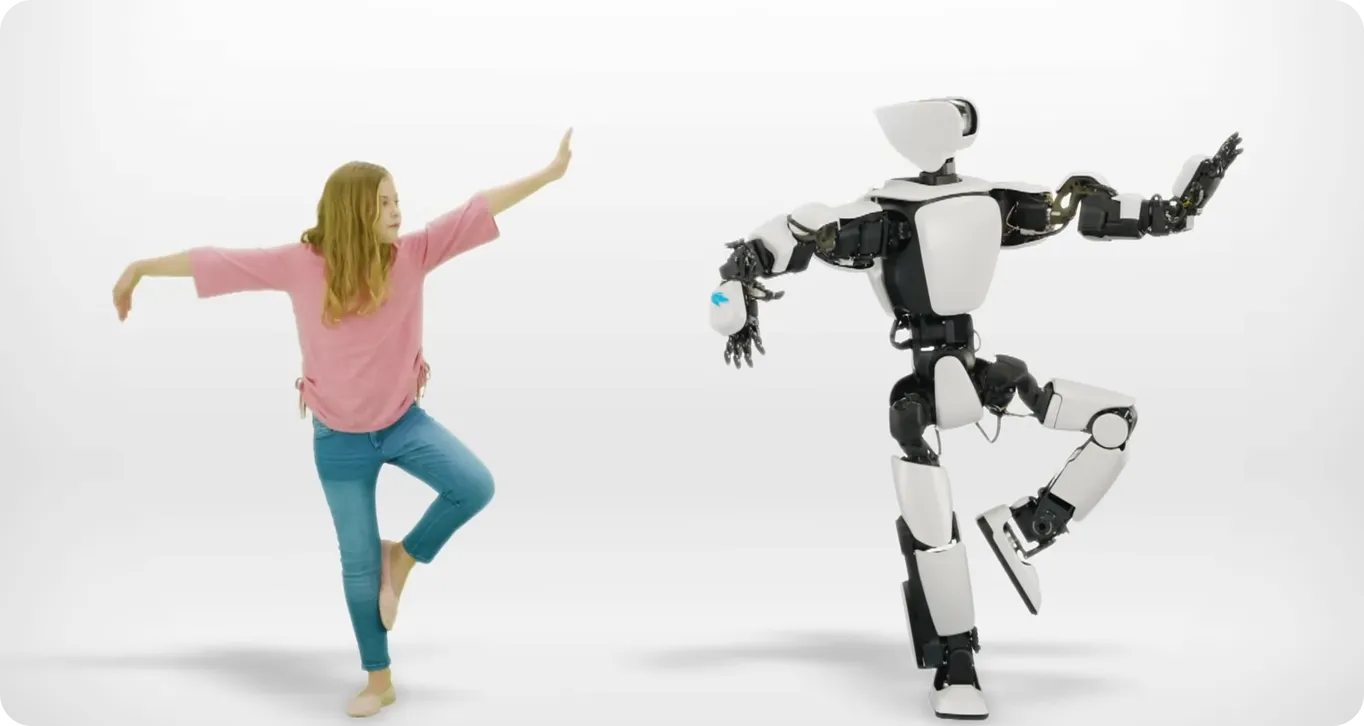
La visión por ordenador se utiliza mucho en los robots humanoides, ya que les permite aprender observando su entorno. Modelos como YOLO11 pueden ayudar a mejorar este proceso al proporcionar detección avanzada de objetos y estimación de poses, lo que ayuda a los robots a interpretar con precisión las acciones y comportamientos humanos.
Al analizar los movimientos e interacciones sutiles en tiempo real, se puede entrenar a los robots para que reproduzcan tareas humanas complejas. Esto les permite ir más allá de las rutinas preprogramadas y aprender tareas, como usar un mando a distancia o un destornillador, simplemente observando a una persona.
Este tipo de aprendizaje puede ser útil en diferentes industrias. Por ejemplo, en la agricultura, los robots pueden observar a los trabajadores humanos aprender tareas como plantar, cosechar y gestionar cultivos. Al copiar cómo los humanos realizan estas tareas, los robots pueden adaptarse a diferentes condiciones agrícolas sin necesidad de ser programados para cada situación.
Del mismo modo, en la sanidad, la visión por ordenador es cada vez más importante. Por ejemplo, YOLO11 puede utilizarse en dispositivos médicos para ayudar a los cirujanos en procedimientos complejos. Con funciones como la detección de objetos y la segmentación de instancias, YOLO11 puede ayudar a los robots a detectar estructuras internas del cuerpo, manejar herramientas quirúrgicas y realizar movimientos precisos.
Aunque pueda parecer algo sacado de la ciencia ficción, investigaciones recientes demuestran la aplicación práctica de la visión por ordenador en procedimientos quirúrgicos. En un interesante estudio sobre disección robótica autónoma para colecistectomía (extirpación de la vesícula biliar), los investigadores integraron YOLO11 para la segmentación de tejidos (clasificación y separación de distintos tejidos en una imagen) y la detección de puntos clave de instrumentos quirúrgicos (identificación de puntos de referencia específicos en las herramientas).
El sistema pudo distinguir con precisión entre diferentes tipos de tejido, incluso cuando los tejidos se deformaban (cambiaban de forma) durante el procedimiento, y se ajustó dinámicamente a estos cambios. Esto hizo posible que los instrumentos robóticos siguieran trayectorias precisas de disección (corte quirúrgico).
Los robots que pueden recoger y colocar objetos están desempeñando un papel clave en la automatización de las operaciones de fabricación y la optimización de las cadenas de suministro. Su velocidad y precisión les permiten realizar tareas con una mínima intervención humana, como la identificación y clasificación de artículos.
Gracias a la precisa segmentación de instancias de YOLO11, los brazos robóticos pueden entrenarse para detect y segment objetos que se mueven por una cinta transportadora, recogerlos con precisión y colocarlos en los lugares designados en función de su tipo y tamaño.
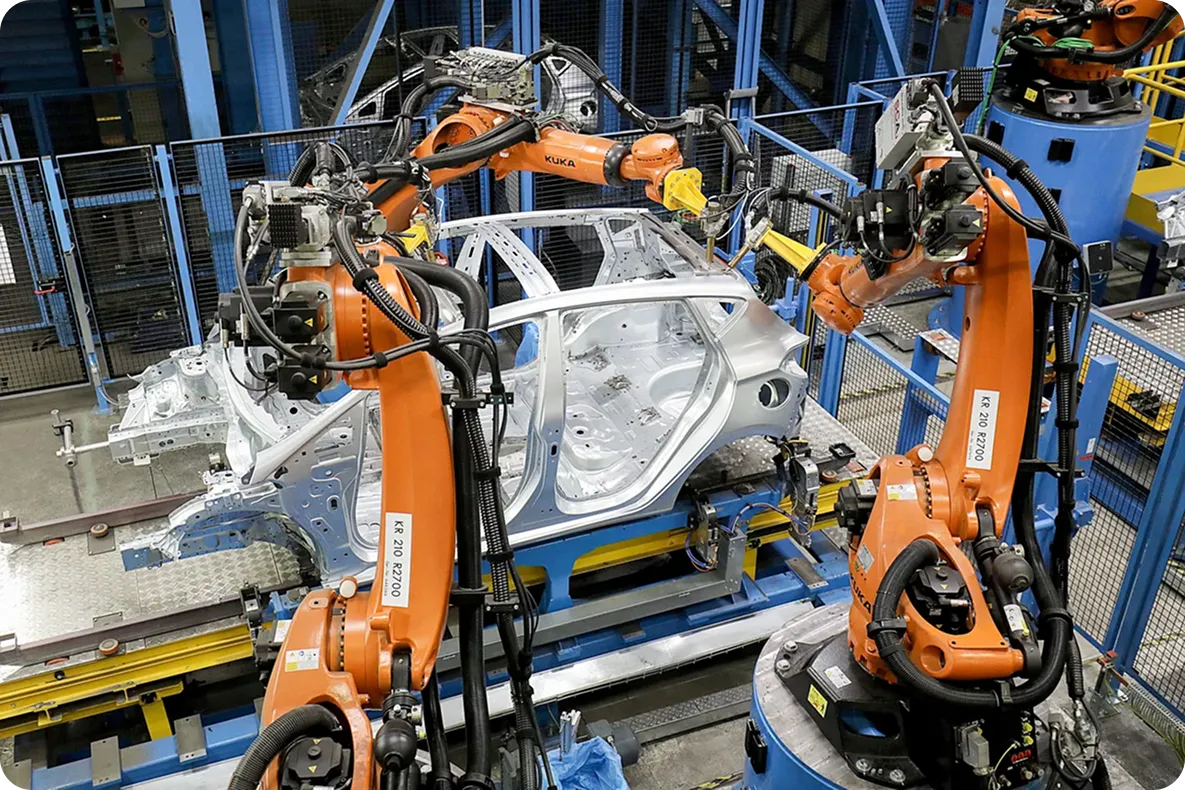
Por ejemplo, los fabricantes de automóviles más conocidos están utilizando robots basados en visión para ensamblar diferentes piezas de automóviles, mejorando la velocidad y la precisión de la cadena de montaje. Los modelos de visión artificial como YOLO11 pueden permitir que estos robots trabajen junto a trabajadores humanos, garantizando una integración perfecta de los sistemas automatizados en entornos de producción dinámicos. Este avance puede dar lugar a tiempos de producción más rápidos, menos errores y productos de mayor calidad.
YOLO11 ofrece varias ventajas clave que lo hacen ideal para su perfecta integración en sistemas robóticos autónomos. Estas son algunas de las principales ventajas:
Si bien los modelos de visión artificial proporcionan herramientas potentes para la visión robótica, existen algunas limitaciones que hay que tener en cuenta al integrarlos en sistemas robóticos del mundo real. Algunas de estas limitaciones son:
Los sistemas de visión artificial no son solo herramientas para los robots de hoy en día; son los pilares de un futuro en el que los robots pueden funcionar de forma autónoma. Con sus capacidades de detección en tiempo real y su compatibilidad con múltiples tareas, son perfectos para la robótica de nueva generación.
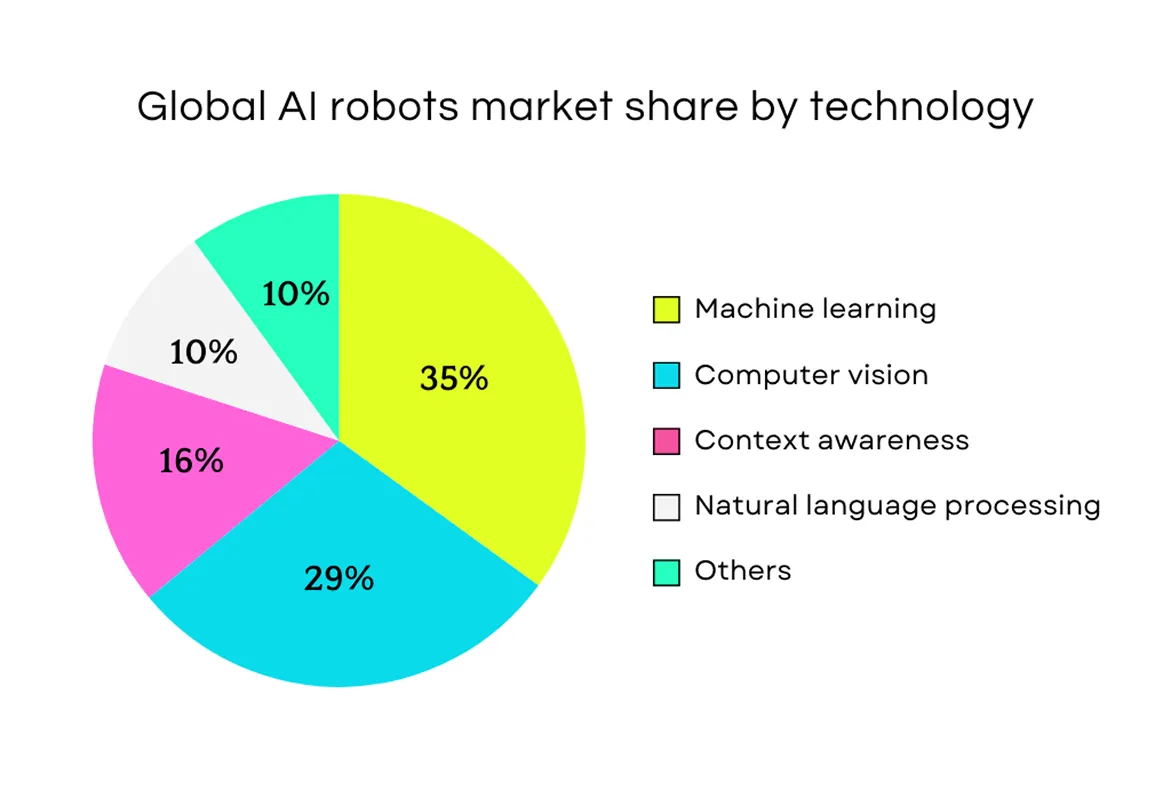
De hecho, las tendencias actuales del mercado muestran que la visión artificial se está volviendo cada vez más esencial en la robótica. Los informes de la industria destacan que la visión artificial es la segunda tecnología más utilizada en el mercado mundial de la robótica con IA.
Gracias a su capacidad para procesar datos visuales en tiempo real, YOLO11 puede ayudar a los robots a detect, identificar e interactuar con su entorno con mayor precisión. Esto supone una gran diferencia en campos como la fabricación, donde los robots pueden colaborar con los humanos, y la sanidad, donde pueden ayudar en cirugías complejas.
A medida que la robótica continúa avanzando, la integración de la visión artificial en dichos sistemas será crucial para permitir que los robots manejen una amplia gama de tareas de manera más eficiente. El futuro de la robótica parece prometedor, con la IA y la visión artificial impulsando máquinas aún más inteligentes y adaptables.
Únase a nuestra comunidad y consulte nuestro repositorio de GitHub para obtener más información sobre los desarrollos recientes en IA. Explore varias aplicaciones de la IA en la atención médica y la visión artificial en la agricultura en nuestras páginas de soluciones. Consulte nuestros planes de licencia para construir sus propias soluciones de visión artificial.
.webp)

.webp)