


Integração da visão computacional na robótica com o Ultralytics YOLO11

Veja mais de perto como os modelos de visão por computador, como o Ultralytics YOLO11 , estão a tornar os robôs mais inteligentes e a moldar o futuro da robótica.

Veja mais de perto como os modelos de visão por computador, como o Ultralytics YOLO11 , estão a tornar os robôs mais inteligentes e a moldar o futuro da robótica.
Os robôs percorreram um longo caminho desde o Unimate, o primeiro robô industrial, inventado na década de 1950. O que começou como máquinas pré-programadas e baseadas em regras agora evoluiu para sistemas inteligentes capazes de executar tarefas complexas e interagir perfeitamente com o mundo real.
Hoje, os robôs estão sendo usados em vários setores, desde manufatura e saúde até agricultura, para diversas automações de processos. Um fator chave na evolução da robótica é a IA e a visão computacional, um ramo da IA que ajuda as máquinas a entender e interpretar informações visuais.
Por exemplo, modelos de visão por computador como o Ultralytics YOLO11 estão a melhorar a inteligência dos sistemas robóticos. Quando integrada nestes sistemas, a IA de visão permite aos robôs reconhecer objectos, navegar em ambientes e tomar decisões em tempo real.
Neste artigo, vamos ver como YOLO11 pode melhorar os robôs com capacidades avançadas de visão por computador e explorar as suas aplicações em vários sectores.
A funcionalidade principal de um robô depende de quão bem ele entende o ambiente ao seu redor. Essa percepção conecta seu hardware físico à tomada de decisões inteligentes. Sem ela, os robôs só podem seguir instruções fixas e têm dificuldades para se adaptar a ambientes em mudança ou lidar com tarefas complexas. Assim como os humanos dependem da visão para navegar, os robôs usam a visão computacional para interpretar seu ambiente, entender a situação e tomar as medidas apropriadas.
De facto, a visão computacional é fundamental para a maioria das tarefas robóticas. Ajuda os robôs a detect objectos e a evitar obstáculos enquanto se deslocam. No entanto, para o fazer, ver o mundo não é suficiente; os robots também têm de ser capazes de reagir rapidamente. Em situações do mundo real, mesmo um ligeiro atraso pode levar a erros dispendiosos. Modelos como o Ultralytics YOLO11 permitem que os robôs obtenham informações em tempo real e reajam instantaneamente, mesmo em situações complexas ou desconhecidas.
Antes de nos debruçarmos sobre a forma como YOLO11 pode ser integrado em sistemas robóticos, vamos primeiro explorar as principais caraterísticas do YOLO11.
Os modelosYOLO Ultralytics suportam várias tarefas de visão computacional que ajudam a fornecer informações rápidas e em tempo real. Em particular, o Ultralytics YOLO11 oferece um desempenho mais rápido, custos computacionais mais baixos e maior precisão. Por exemplo, pode ser utilizado para detect objectos em imagens e vídeos com elevada precisão, o que o torna perfeito para aplicações em áreas como a robótica, os cuidados de saúde e o fabrico.
Eis algumas caraterísticas impactantes que fazem do YOLO11 uma óptima opção para a robótica:
Fácil de utilizar: A documentação e a interface de fácil compreensão doYOLO11ajudam a reduzir a curva de aprendizagem, tornando-o simples de integrar em sistemas robóticos.

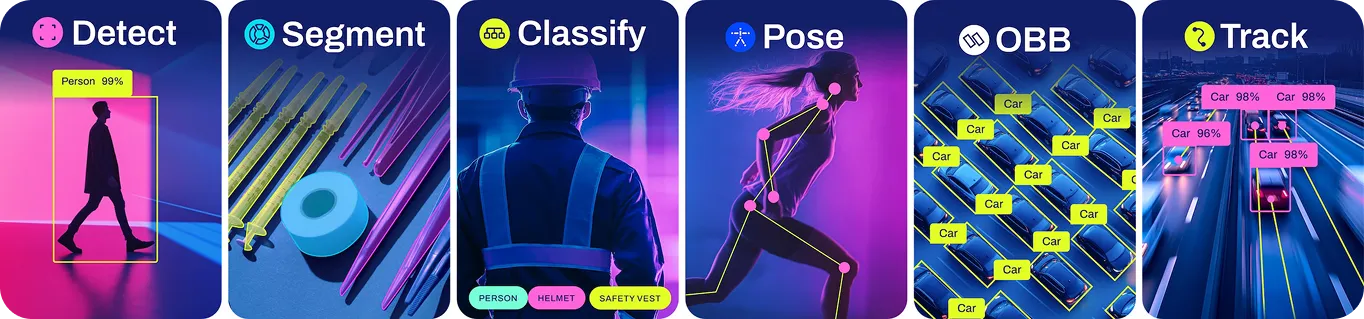
Eis um olhar mais atento a algumas das tarefas de visão por computador suportadas pelo YOLO11 :
Da aprendizagem inteligente à automação industrial, modelos como o YOLO11 podem ajudar a redefinir o que os robots podem fazer. A sua integração na robótica demonstra como os modelos de visão por computador estão a impulsionar os avanços na automação. Vamos explorar alguns domínios chave onde YOLO11 pode ter um impacto significativo.
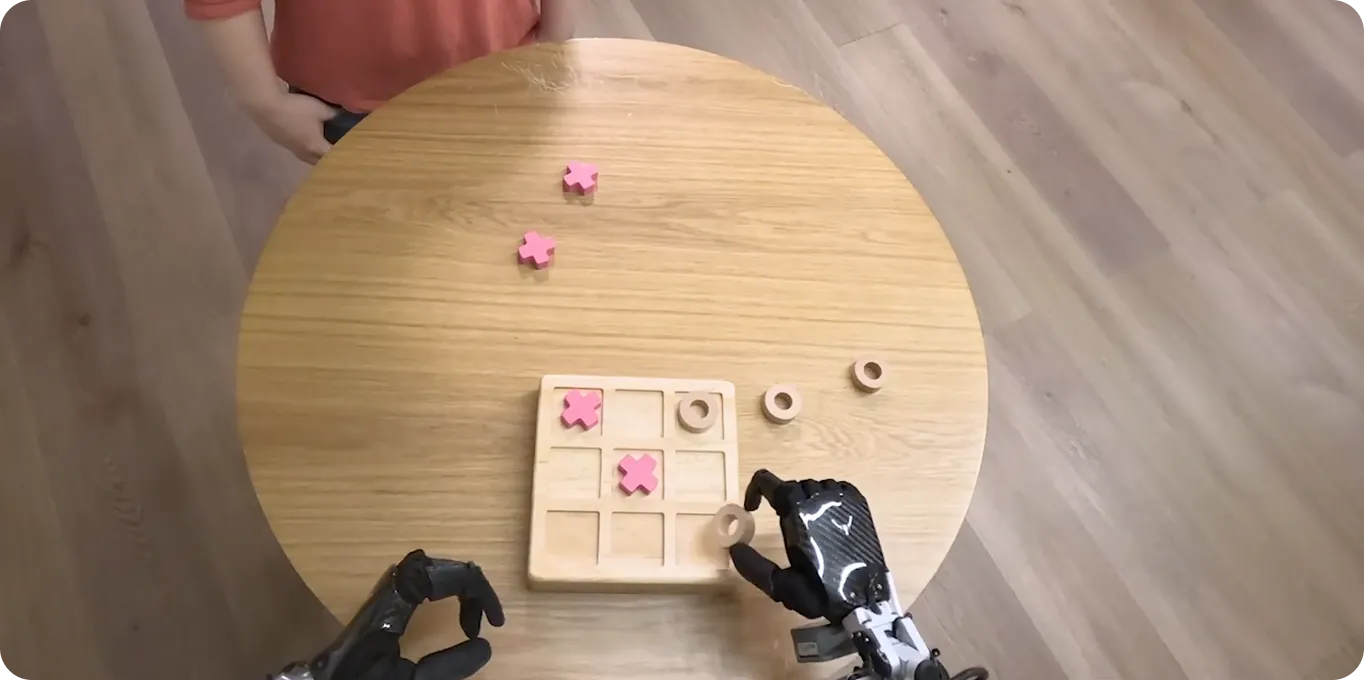
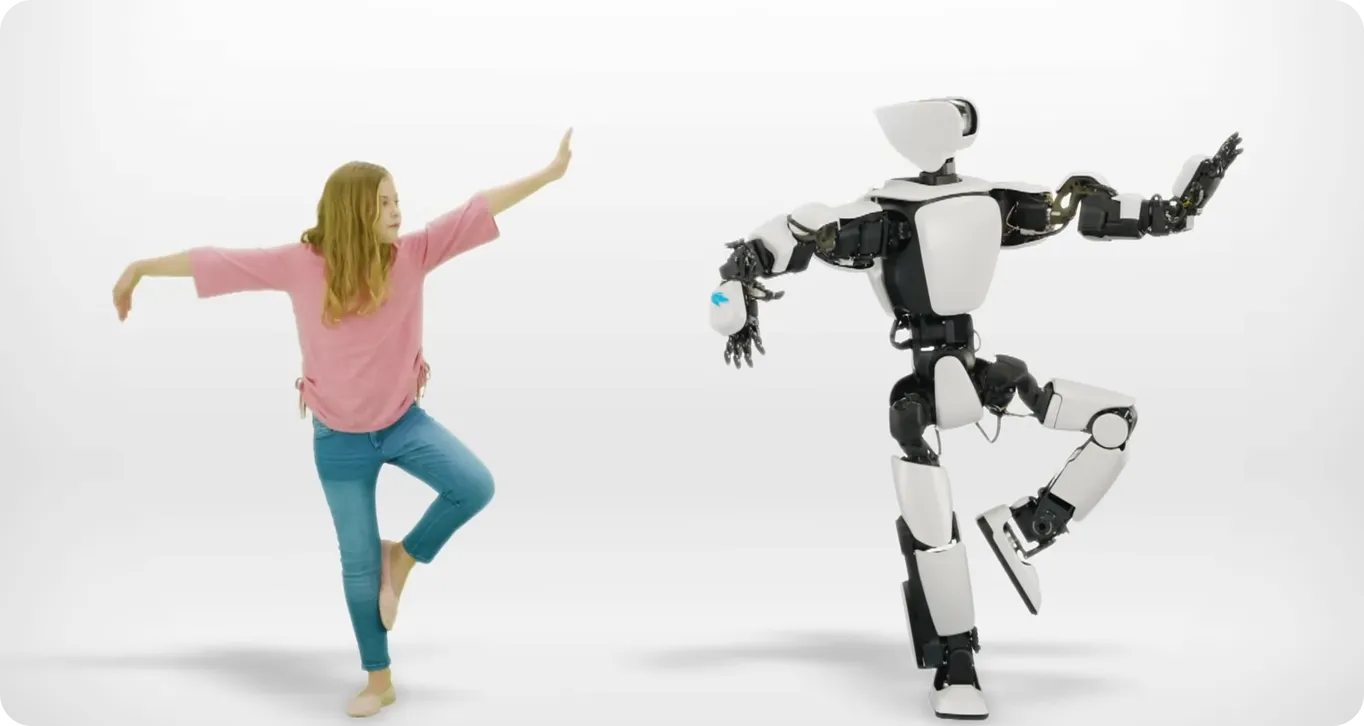
A visão por computador é amplamente utilizada em robôs humanóides, permitindo-lhes aprender através da observação do seu ambiente. Modelos como o YOLO11 podem ajudar a melhorar este processo, fornecendo deteção avançada de objectos e estimativa de pose, o que ajuda os robôs a interpretar com precisão as acções e comportamentos humanos.
Ao analisar movimentos e interações subtis em tempo real, os robôs podem ser treinados para replicar tarefas humanas complexas. Isto permite-lhes ir além das rotinas pré-programadas e aprender tarefas, como usar um controlo remoto ou uma chave de fendas, simplesmente observando uma pessoa.
Este tipo de aprendizado pode ser útil em diferentes setores. Por exemplo, na agricultura, os robôs podem observar trabalhadores humanos aprendendo tarefas como plantio, colheita e gestão de culturas. Ao copiar como os humanos fazem essas tarefas, os robôs podem se ajustar a diferentes condições agrícolas sem precisar ser programados para cada situação.
Do mesmo modo, nos cuidados de saúde, a visão por computador está a tornar-se cada vez mais importante. Por exemplo, YOLO11 pode ser utilizado em dispositivos médicos para ajudar os cirurgiões em procedimentos complexos. Com funcionalidades como a deteção de objectos e a segmentação de instâncias, YOLO11 pode ajudar os robôs a detetar estruturas internas do corpo, gerir ferramentas cirúrgicas e fazer movimentos precisos.
Embora isto possa parecer algo saído da ficção científica, uma investigação recente demonstra a aplicação prática da visão por computador em procedimentos cirúrgicos. Num estudo interessante sobre dissecção robótica autónoma para colecistectomia (remoção da vesícula biliar), os investigadores integraram YOLO11 para segmentação de tecidos (classificação e separação de diferentes tecidos numa imagem) e deteção de pontos-chave de instrumentos cirúrgicos (identificação de pontos de referência específicos nos instrumentos).
O sistema foi capaz de distinguir com precisão entre diferentes tipos de tecido - mesmo quando os tecidos se deformavam (mudavam de forma) durante o procedimento - e ajustou-se dinamicamente a essas mudanças. Isso tornou possível que os instrumentos robóticos seguissem caminhos precisos de dissecção (corte cirúrgico).
Robôs que podem pegar e colocar objetos estão desempenhando um papel fundamental na automação de operações de fabricação e na otimização de cadeias de suprimentos. Sua velocidade e precisão permitem que eles executem tarefas com o mínimo de intervenção humana, como identificar e classificar itens.
Com a segmentação precisa de instâncias do YOLO11, os braços robóticos podem ser treinados para detect e segment objectos em movimento numa correia transportadora, recolhê-los com precisão e colocá-los em locais designados com base no seu tipo e tamanho.
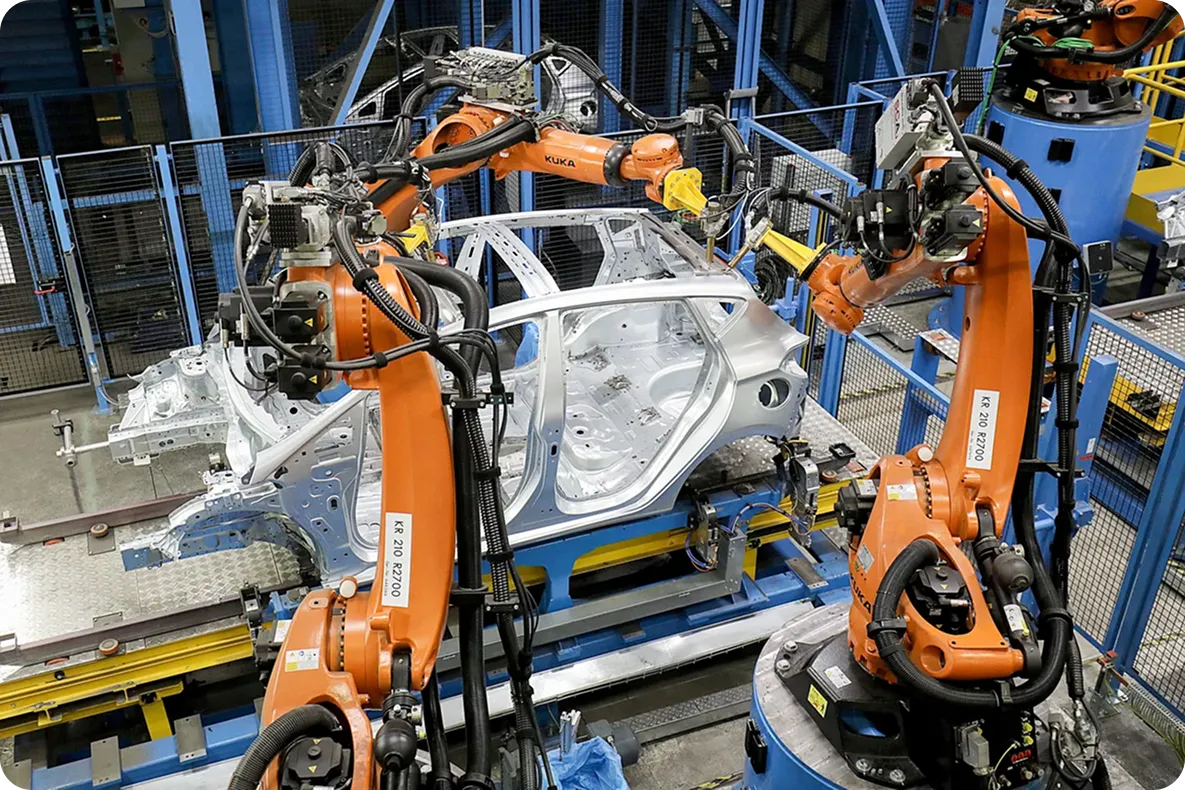
Por exemplo, os fabricantes de automóveis populares estão a utilizar robôs baseados na visão para montar diferentes peças de automóveis, melhorando a velocidade e a precisão da linha de montagem. Os modelos de visão por computador como o YOLO11 podem permitir que estes robots trabalhem em conjunto com trabalhadores humanos, assegurando uma integração perfeita de sistemas automatizados em ambientes de produção dinâmicos. Esse avanço pode levar a tempos de produção mais rápidos, menos erros e produtos de maior qualidade.
YOLO11 oferece várias vantagens importantes que o tornam ideal para uma integração perfeita em sistemas de robótica autónoma. Aqui estão algumas das principais vantagens:
Embora os modelos de visão computacional forneçam ferramentas poderosas para a visão robótica, existem algumas limitações a serem consideradas ao integrá-los em sistemas de robótica do mundo real. Algumas dessas limitações incluem:
Os sistemas de visão computacional não são apenas ferramentas para os robôs de hoje; são blocos de construção para um futuro onde os robôs podem operar autonomamente. Com as suas capacidades de deteção em tempo real e suporte para múltiplas tarefas, são perfeitos para a robótica de próxima geração.
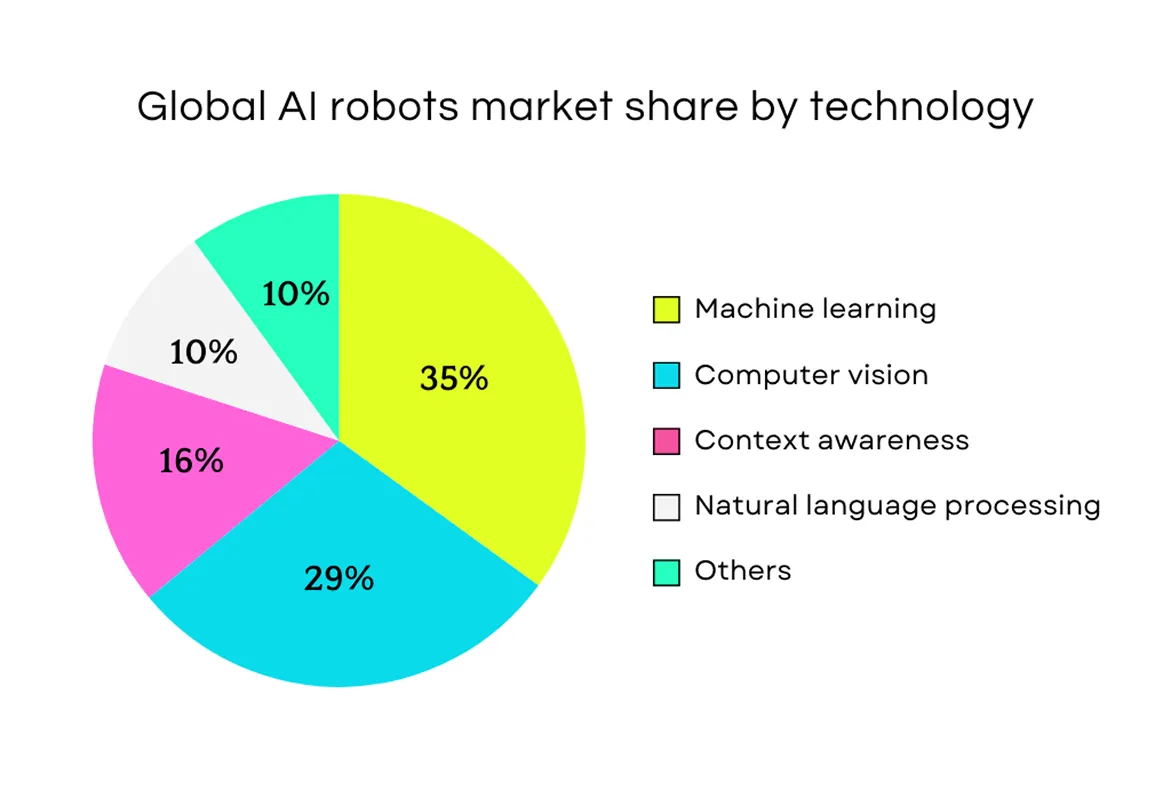
Na verdade, as tendências atuais do mercado mostram que a visão computacional está se tornando cada vez mais essencial na robótica. Relatórios da indústria destacam que a visão computacional é a segunda tecnologia mais utilizada no mercado global de robótica de IA.
Com a sua capacidade de processar dados visuais em tempo real, YOLO11 pode ajudar os robôs a detect, identificar e interagir com o que os rodeia de forma mais precisa. Isto faz uma enorme diferença em domínios como a indústria transformadora, onde os robôs podem colaborar com os humanos, e os cuidados de saúde, onde podem ajudar em cirurgias complexas.
À medida que a robótica continua a avançar, a integração da visão computacional nesses sistemas será crucial para permitir que os robôs lidem com uma ampla gama de tarefas de forma mais eficiente. O futuro da robótica parece promissor, com a IA e a visão computacional impulsionando máquinas ainda mais inteligentes e adaptáveis.
Junte-se à nossa comunidade e confira nosso repositório GitHub para saber mais sobre os desenvolvimentos recentes em IA. Explore várias aplicações de IA na área da saúde e visão computacional na agricultura em nossas páginas de soluções. Confira nossos planos de licenciamento para construir suas próprias soluções de visão computacional.
.webp)

.webp)