


دمج الرؤية الحاسوبية في مجال الروبوتات مع Ultralytics YOLO11

ألقِ نظرة عن كثب على كيفية قيام نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 بجعل الروبوتات أكثر ذكاءً وتشكيل مستقبل الروبوتات.

ألقِ نظرة عن كثب على كيفية قيام نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 بجعل الروبوتات أكثر ذكاءً وتشكيل مستقبل الروبوتات.
لقد قطعت الروبوتات شوطًا طويلاً منذ Unimate، أول روبوت صناعي، تم اختراعه في الخمسينيات. ما بدأ كآلات مبرمجة مسبقًا وقائمة على القواعد قد تطور الآن إلى أنظمة ذكية قادرة على أداء مهام معقدة والتفاعل بسلاسة مع العالم الحقيقي.
اليوم، يتم استخدام الروبوتات في مختلف الصناعات من التصنيع والرعاية الصحية إلى الزراعة، لأتمتة العمليات المتنوعة. أحد العوامل الرئيسية في تطور الروبوتات هو الذكاء الاصطناعي و الرؤية الحاسوبية، وهو فرع من فروع الذكاء الاصطناعي يساعد الآلات على فهم وتفسير المعلومات المرئية.
على سبيل المثال، نماذج الرؤية الحاسوبية مثل Ultralytics YOLO11 تعمل على تحسين ذكاء الأنظمة الروبوتية. عند دمجها في هذه الأنظمة، يمكّن الذكاء الاصطناعي للرؤية الروبوتات من التعرف على الأشياء والتنقل في البيئات واتخاذ القرارات في الوقت الفعلي.
في هذه المقالة، سنلقي نظرة على كيفية تعزيز YOLO11 للروبوتات بقدرات رؤية حاسوبية متقدمة واستكشاف تطبيقاته في مختلف الصناعات.
تعتمد الوظيفة الأساسية للروبوت على مدى فهمه لمحيطه. يربط هذا الوعي أجهزته المادية باتخاذ القرارات الذكية. وبدونه، لا يمكن للروبوتات سوى اتباع تعليمات ثابتة وتواجه صعوبة في التكيف مع البيئات المتغيرة أو التعامل مع المهام المعقدة. تمامًا كما يعتمد البشر على البصر للتنقل، تستخدم الروبوتات رؤية الكمبيوتر لتفسير بيئتها وفهم الموقف واتخاذ الإجراءات المناسبة.
في الواقع، تعتبر الرؤية الحاسوبية أساسية لمعظم المهام الروبوتية. فهي تساعد الروبوتات على detect الأجسام وتجنب العقبات أثناء التنقل. ولكن، للقيام بذلك، فإن رؤية العالم لا تكفي؛ إذ يجب أن تكون الروبوتات قادرة على الاستجابة بسرعة. في مواقف العالم الحقيقي، حتى التأخير الطفيف يمكن أن يؤدي إلى أخطاء مكلفة. تُمكِّن نماذج مثل Ultralytics YOLO11 الروبوتات من جمع الأفكار في الوقت الفعلي والاستجابة الفورية، حتى في المواقف المعقدة أو غير المألوفة.
قبل أن نتعمق في كيفية دمج YOLO11 في الأنظمة الروبوتية، دعنا أولاً نستكشف ميزات YOLO11الرئيسية.
تدعم نماذجUltralytics YOLO العديد من مهام الرؤية الحاسوبية التي تساعد في تقديم رؤى سريعة وفورية. على وجه الخصوص، يوفر Ultralytics YOLO11 أداءً أسرع وتكاليف حسابية أقل ودقة محسنة. على سبيل المثال، يمكن استخدامها detect الأجسام في الصور ومقاطع الفيديو بدقة عالية، مما يجعلها مثالية للتطبيقات في مجالات مثل الروبوتات والرعاية الصحية والتصنيع.
إليك بعض الميزات المؤثرة التي تجعل من YOLO11 خياراً رائعاً للروبوتات:
سهولة الاستخدام: تساعد وثائق وواجهةYOLO11سهلة الفهم في تقليل منحنى التعلم، مما يجعل من السهل دمجها في الأنظمة الآلية.

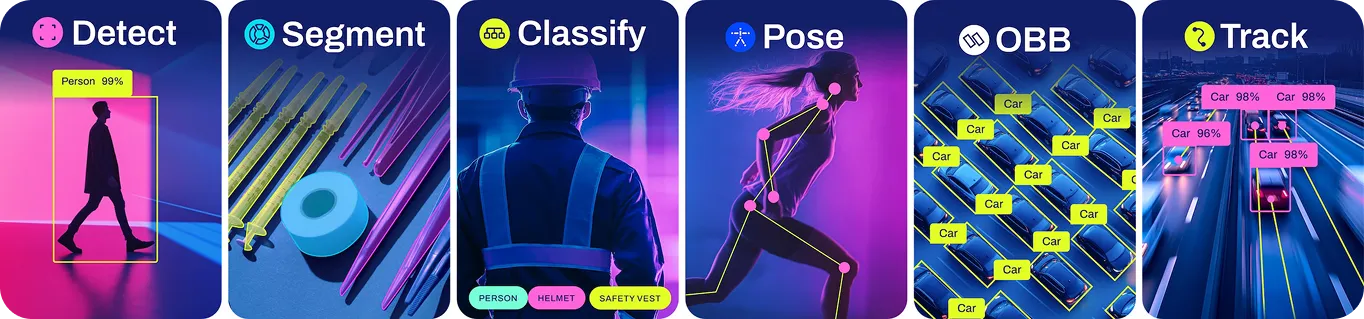
إليك نظرة فاحصة على بعض مهام الرؤية الحاسوبية التي يدعمها YOLO11 :
من التعلّم الذكي إلى الأتمتة الصناعية، يمكن لنماذج مثل YOLO11 أن تساعد في إعادة تعريف ما يمكن أن تفعله الروبوتات. ويوضح تكاملها في مجال الروبوتات كيف أن نماذج الرؤية الحاسوبية تقود التقدم في مجال الأتمتة. دعونا نستكشف بعض المجالات الرئيسية التي يمكن أن يكون لـ YOLO11 تأثير كبير فيها.
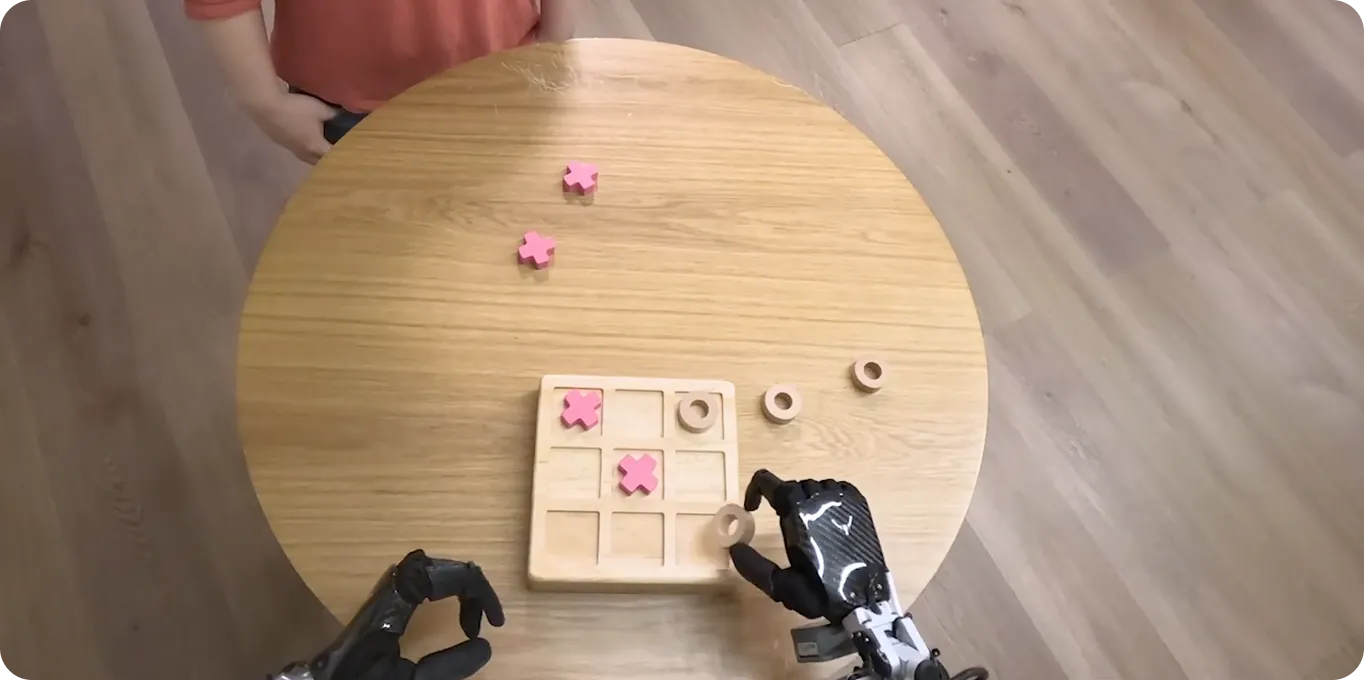
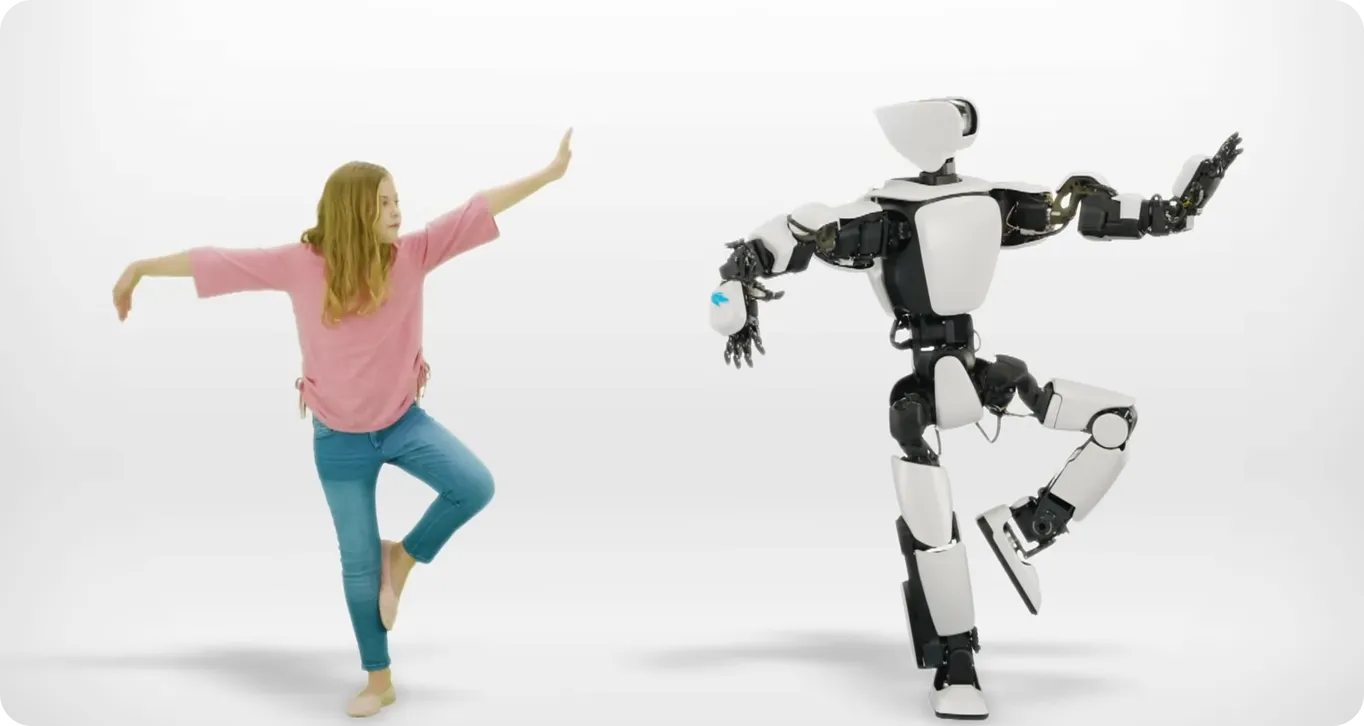
تُستخدم الرؤية الحاسوبية على نطاق واسع في الروبوتات الشبيهة بالبشر، مما يمكّنها من التعلم من خلال مراقبة بيئتها. يمكن لنماذج مثل YOLO11 أن تساعد في تعزيز هذه العملية من خلال توفير كشف متقدم للأشياء وتقدير الوضعية، مما يساعد الروبوتات على تفسير الأفعال والسلوكيات البشرية بدقة.
من خلال تحليل الحركات والتفاعلات الدقيقة في الوقت الفعلي، يمكن تدريب الروبوتات على تكرار المهام البشرية المعقدة. يتيح لهم ذلك تجاوز الروتينات المبرمجة مسبقًا وتعلم المهام، مثل استخدام جهاز التحكم عن بعد أو مفك البراغي، ببساطة عن طريق مشاهدة شخص ما.
يمكن أن يكون هذا النوع من التعلم مفيدًا في مختلف الصناعات. على سبيل المثال، في الزراعة، يمكن للروبوتات مشاهدة العمال البشريين وهم يتعلمون مهام مثل الزراعة والحصاد وإدارة المحاصيل. من خلال نسخ كيفية قيام البشر بهذه المهام، يمكن للروبوتات التكيف مع الظروف الزراعية المختلفة دون الحاجة إلى برمجتها لكل موقف.
وبالمثل، في مجال الرعاية الصحية، أصبحت الرؤية الحاسوبية أكثر أهمية. على سبيل المثال، يمكن استخدام YOLO11 في الأجهزة الطبية لمساعدة الجراحين في العمليات المعقدة. من خلال ميزات مثل اكتشاف الأجسام وتجزئة المثيلات، يمكن أن يساعد YOLO11 الروبوتات على اكتشاف هياكل الجسم الداخلية وإدارة الأدوات الجراحية وإجراء حركات دقيقة.
في حين أن هذا قد يبدو وكأنه شيء من الخيال العلمي، إلا أن الأبحاث الحديثة توضح التطبيق العملي للرؤية الحاسوبية في العمليات الجراحية. في دراسة مثيرة للاهتمام حول التشريح الروبوتي المستقل لاستئصال المرارة (استئصال المرارة)، قام الباحثون بدمج YOLO11 لتجزئة الأنسجة (تصنيف وفصل الأنسجة المختلفة في الصورة) واكتشاف النقاط الرئيسية للأدوات الجراحية (تحديد معالم محددة على الأدوات).
تمكن النظام من التمييز بدقة بين أنواع الأنسجة المختلفة - حتى عندما تشوهت الأنسجة (تغير شكلها) أثناء الإجراء - وتكيف ديناميكيًا مع هذه التغييرات. وقد جعل ذلك من الممكن للأدوات الروبوتية اتباع مسارات تشريح دقيقة (قطع جراحي).
تلعب الروبوتات التي يمكنها التقاط الأشياء ووضعها دورًا رئيسيًا في أتمتة عمليات التصنيع وتحسين سلاسل التوريد. تمكنهم سرعتهم ودقتهم من أداء المهام بأقل تدخل بشري، مثل تحديد العناصر وفرزها.
يمكن تدريب YOLO11الروبوتية على detect الأجسام التي تتحرك على الحزام الناقل segment بدقة والتقاطها ووضعها في مواقع محددة بناءً على نوعها وحجمها.
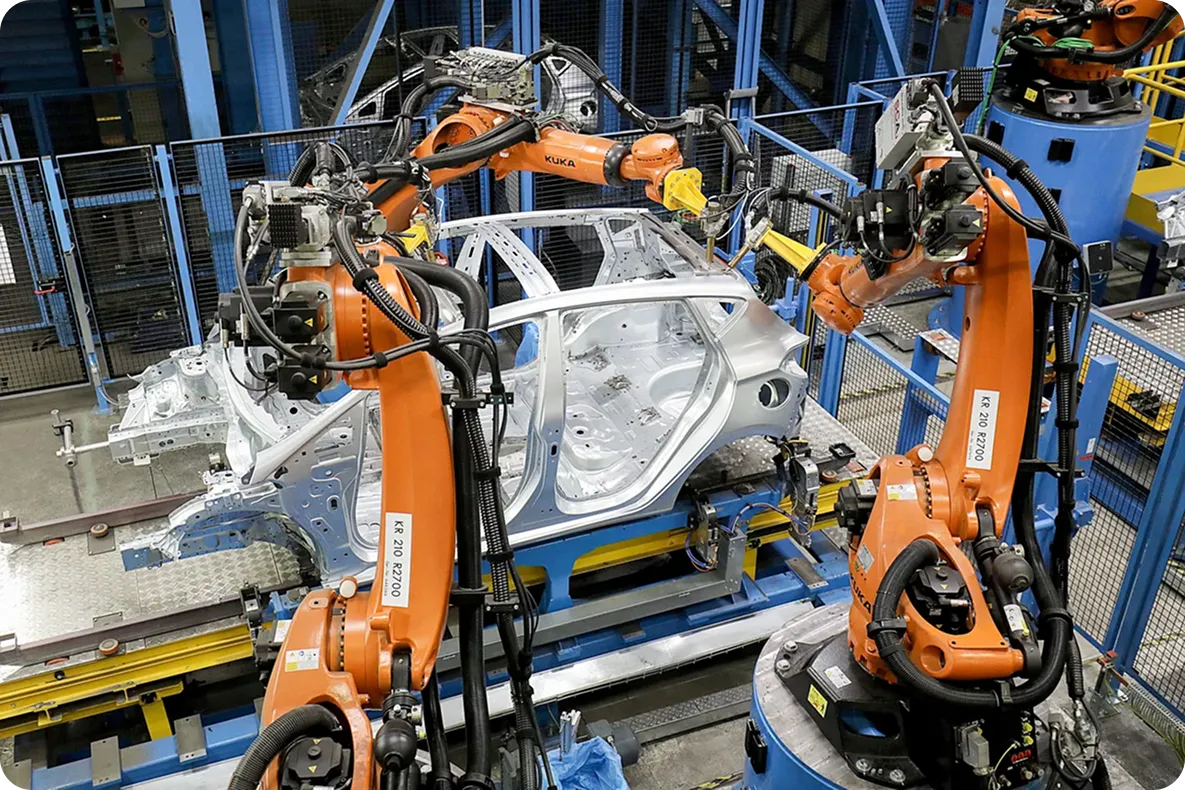
على سبيل المثال، تستخدم شركات تصنيع السيارات الشهيرة الروبوتات القائمة على الرؤية لتجميع أجزاء السيارات المختلفة، مما يحسن سرعة ودقة خط التجميع. يمكن لنماذج الرؤية الحاسوبية مثل YOLO11 تمكين هذه الروبوتات من العمل جنبًا إلى جنب مع العمال البشر، مما يضمن التكامل السلس للأنظمة الآلية في إعدادات الإنتاج الديناميكية. يمكن أن يؤدي هذا التقدم إلى أوقات إنتاج أسرع، وأخطاء أقل، ومنتجات ذات جودة أعلى.
يوفر YOLO11 العديد من المزايا الرئيسية التي تجعله مثاليًا للاندماج السلس في أنظمة الروبوتات المستقلة. فيما يلي بعض المزايا الرئيسية:
في حين أن نماذج الرؤية الحاسوبية توفر أدوات قوية للرؤية الروبوتية، إلا أن هناك بعض القيود التي يجب مراعاتها عند دمجها في أنظمة الروبوتات الواقعية. تتضمن بعض هذه القيود ما يلي:
أنظمة الرؤية الحاسوبية ليست مجرد أدوات لروبوتات اليوم؛ بل هي لبنات بناء لمستقبل يمكن فيه للروبوتات أن تعمل بشكل مستقل. بفضل قدراتها على الكشف في الوقت الفعلي ودعمها لمهام متعددة، فهي مثالية للجيل القادم من الروبوتات.
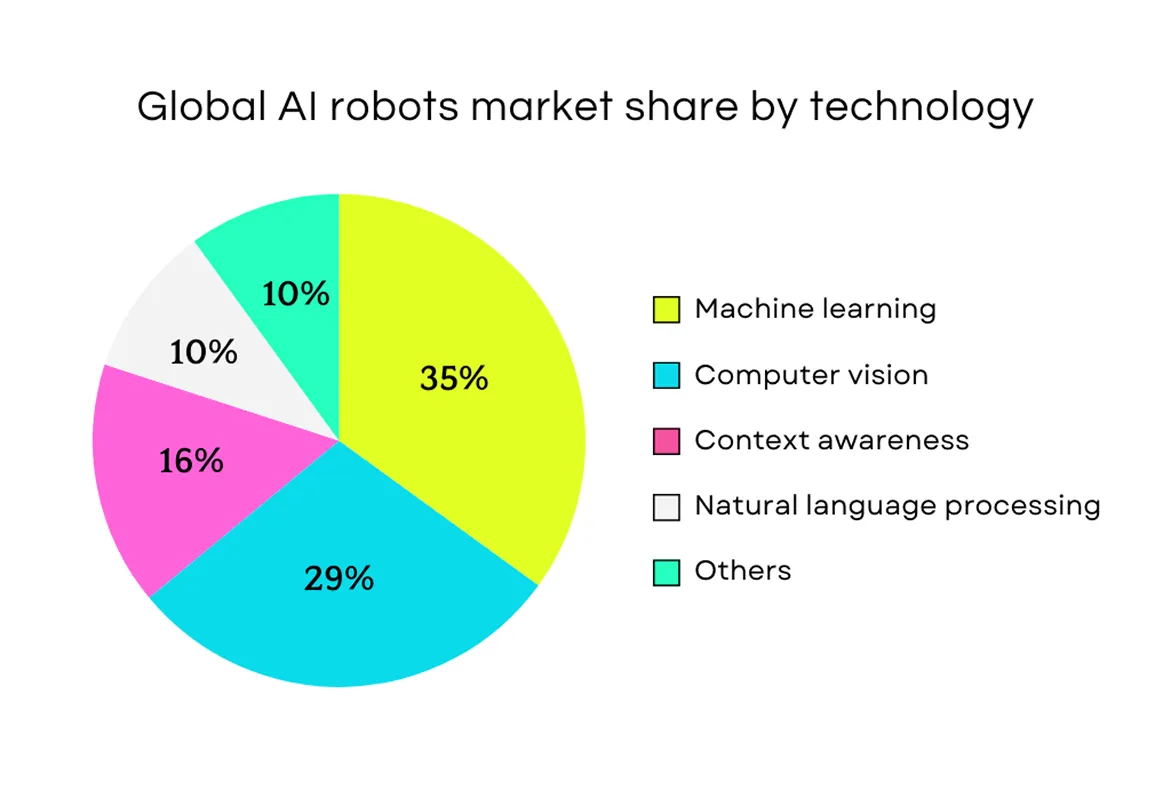
في الواقع، تظهر اتجاهات السوق الحالية أن الرؤية الحاسوبية أصبحت ضرورية بشكل متزايد في مجال الروبوتات. تسلط تقارير الصناعة الضوء على أن الرؤية الحاسوبية هي ثاني أكثر التقنيات استخدامًا في سوق الروبوتات المدعومة بالذكاء الاصطناعي العالمي.
بفضل قدرتها على معالجة البيانات المرئية في الوقت الفعلي، يمكن أن تساعد YOLO11 الروبوتات على detect وتحديد والتفاعل مع محيطها بشكل أكثر دقة. وهذا يُحدث فرقاً كبيراً في مجالات مثل التصنيع، حيث يمكن للروبوتات التعاون مع البشر، والرعاية الصحية، حيث يمكنها المساعدة في العمليات الجراحية المعقدة.
مع استمرار تطور الروبوتات، سيكون دمج رؤية الكمبيوتر في هذه الأنظمة أمرًا بالغ الأهمية لتمكين الروبوتات من التعامل مع مجموعة واسعة من المهام بكفاءة أكبر. يبدو مستقبل الروبوتات واعدًا، حيث يقود الذكاء الاصطناعي ورؤية الكمبيوتر آلات أكثر ذكاءً وقدرة على التكيف.
انضم إلى مجتمعنا وتحقق من مستودع GitHub الخاص بنا لمعرفة المزيد حول التطورات الأخيرة في مجال الذكاء الاصطناعي. استكشف التطبيقات المختلفة لـ الذكاء الاصطناعي في الرعاية الصحية و الرؤية الحاسوبية في الزراعة في صفحات الحلول الخاصة بنا. تحقق من خطط الترخيص الخاصة بنا لبناء حلول الرؤية الحاسوبية الخاصة بك.
.webp)

.webp)